MIRI MRS Field and Coordinates
JWST MIRI's medium-resolution spectrometer (MRS) has 4 separate integral field units (IFUs) that image the sky simultaneously at different wavelengths, resulting in a complicated one-to-many mapping between sky plane position and detector pixels. This article describes some of the details of this mapping as it affects the pointing, orientation, and field of view of the MRS.
On this page
MRS field of view
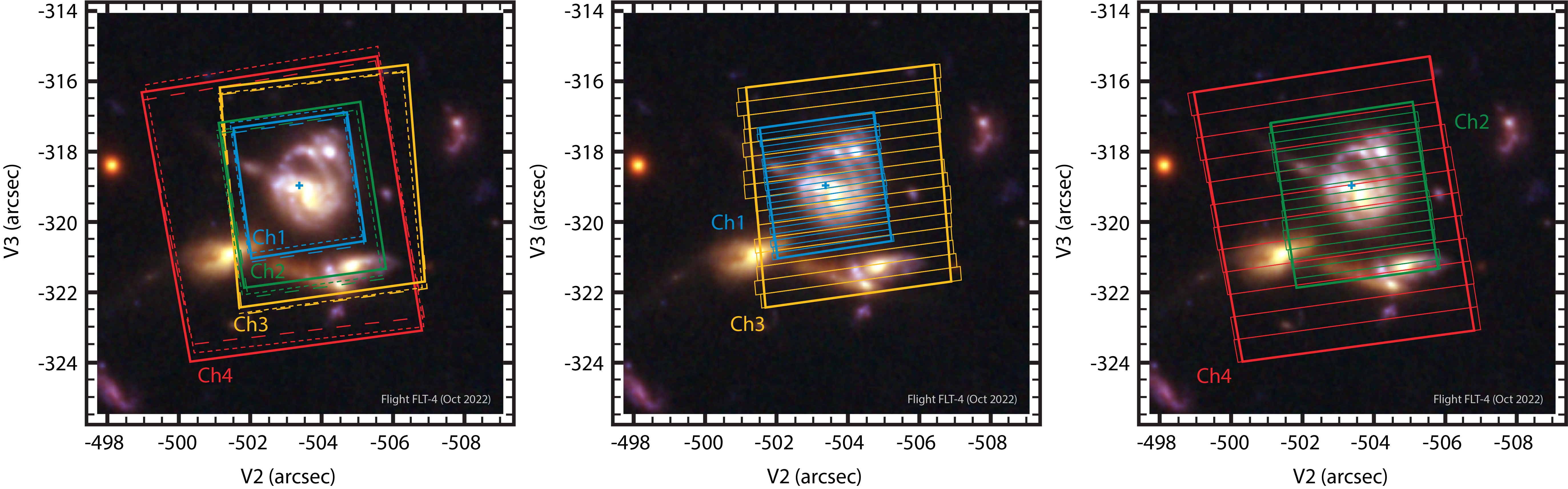
The nominal MRS footprint on the sky is shown (e.g., in APT) as a distorted rectangle for each channel, with slight differences for each sub-band (see Figure 1, left panel). However, this is only an approximation; the true footprint at each wavelength is actually the combined collection of footprints from each individual optical slicer element of the integral field unit (IFU). These slices are not perfectly aligned with each other, and the true footprint of the IFU at a fixed transmission threshhold is therefore staggered (see Figure 1, middle and right panels). The nominal footprints are calculated by inscribing a quadrilateral within the individual slice boundaries. Individual slices thus extend slightly beyond the nominal field boundary for a given MRS band, ensuring complete coverage within the nominal field. Table 1 in MIRI Medium-Resolution Spectroscopy gives the nominal field sizes calculated by averaging over the 3 sub-bands within each MRS channel.
Figure 1. MRS field of view
Click on the figure for a larger view.
Left panel: MIRI MRS fields of view in the JWST coordinate frame (V2, V3); the field borders are drawn as solid lines (sub-band A), dashes (sub-band B), and dots (sub-band C) for channels 1 (blue), 2 (green), 3 (yellow), and 4 (red).
Middle and right panels: Individual slices (of sub-band A) that make up the MRS field of view are illustrated for channels 1 (blue), 2 (green), 3 (yellow), and 4 (red). The rectangular summary footprint inscribes these individual slice footprints.
MRS coordinate frames
Words in bold are GUI menus/
panels or data software packages;
bold italics are buttons in GUI
tools or package parameters.
- The (V2, V3) coordinate frame is a spherical coordinate system tied to JWST that can be mapped to astronomical right ascension and declination by a series of Euler angle rotations. (V2, V3) is measured in units of arcseconds relative to the telescope boresight.
- The (α, β) coordinate frames are defined locally to each of the 12 MRS bands in which α and β correspond to the along-slice and across-slice directions respectively. (α, β) is measured in units of arcseconds relative to the center of the IFU field of view.
- The ideal coordinate frame is used to define the dither offsets applied by APT. For the MRS, it is defined such that +XIdeal lies along −V2, and +YIdeal along +V3 with origin located at the MRS pointing origin for a given Primary Channel.
As illustrated in Figure 1, due to the differing optical paths, each of the 12 MRS fields of view is rotated by a slightly different amount with respect to the JWST V2,V3 coordinate system, and further distorted such that the along-slice (α) direction at the top and bottom of the IFU are not quite parallel to each other. On average, however, the along-slice direction of MRS is rotated by 8.4°, 8.2°, 7.5°, and 8.3° with respect to the V2,V3 coordinate system for channels 1, 2, 3, and 4 respectively. Since the MIRI imager is itself rotated by about 4.7° with respect to V2,V3, the MIRI imager and the MRS are therefore rotated with respect to each other by about 3°.
These angles between the different MRS fields of view and the ideal coordinate frame must be taken into account if specifying a particular position angle for observations in APT (via the aperture PA). For instance, an aperture position angle of 360° − 8.4° = 351.6° would orient the IFU such that the channel 1 across-slice direction (β) is north-south on the sky, while the along-slice direction (α) is east-west on the sky. Similarly, a position angle of 90° − 7.5° = 82.5° would align the channel 3 across-slice direction (β) east-west on the sky and the along-slice direction (α) north-south.
MRS pointing origins
Since each of the MRS channels have a slightly different field of view, they each have a different pointing origin with respect to which dither offsets are defined. For the 4 channels, these are defined as the pointing origin ((α, β) = (0,0)) locations in the Ch1A, Ch2A, Ch3A, and Ch4A coordinate frames, respectively, and set the locations at which an astronomical target would be placed in the field of view when observing with a given Primary Channel set in APT if no dither offset were applied. These pointing origins are given in Table 1 below; note, however, that these values are indicative and may be superseded by the official values in the MIRI Science Instruments Aperture File (SIAF).
Since all 4 channels are observed simultaneously, for purposes of the JWST pipeline and world coordinate system specifications, the channel 1 pointing origin is defined to be the reference point (V2_REF, V3_REF) for all MRS observations.
Table 1. MRS Cycle 1 pointing origins (FLT-4, September 2022)
| Channel | V2 pointing origin value | V3 pointing origin value |
|---|---|---|
| 1/ALL | -503.378 | -318.999 |
| 2 | -503.465 | -319.287 |
| 3 | -504.032 | -319.001 |
| 4 | -502.734 | -319.738 |